実証 03 スマートフォンを活用した3Dマップ更新検証
人々が参加し
アップデートする、
デジタルツイン

概要
建物モデルでは表しきれない、より詳細な都市の要素を点群データ※1により付加します。
変化の早い街の3Dデータを都民参加によって更新しやすいよう、スマートフォンのLiDAR※2機能を用いて点群データを取得・更新する仕組みを検証します。
-
点群データ (ポイントクラウド)
三次元空間上での位置や色の情報を持つ点群が集合した3次元データのこと。点が集まることによって物体の形状や質感を表現する。 -
LiDAR (Light Detection and Ranging)
点群データを取得するセンサの一種。レーザー光を様々な方向に飛ばし、跳ね返ってきた情報から周囲の環境をセンシングし点群データを作成する。
目的
- 点群データの重畳により、3D都市モデルを精緻化する。
- 人々がスマートフォンを用いて手軽に、都市の様々な要素をすぐに3D都市モデル上に反映、更新する仕組みを試行する。
実施エリア 西新宿地区
参加型実証 上野恩賜公園

実施スケジュール
- 2021年10月まで
- ベース点群データ取得
- 2021年12月まで
- LiDARによるデータ取得・
ベース点群データへの重畳 - 2022年2月まで
- AR表示検証
- 2022年3月まで
- 成果とりまとめ
3Dデジタルマップ更新の
実証手法
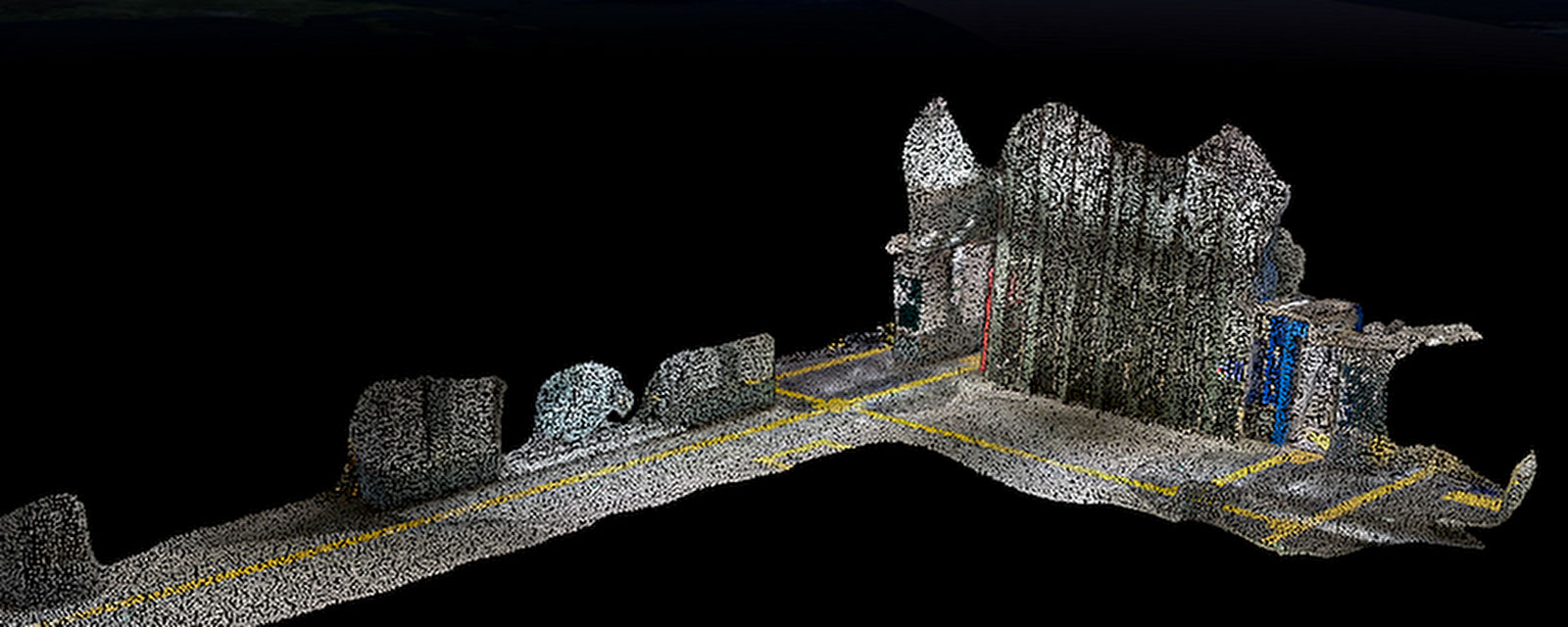
大型測量機器を利用し取得したベース点群について、スマートフォンで取得した点群を重ね合わせることで更新を行いました。今回、位置合わせについて自動で行うことを試行しました。さらに点群と併せてメッシュモデル※3を重畳することで、よりモデルの可視性を高めることも試行しました。 図「スマートフォンによる点群取得」は実際の点群取得の様子です。動画撮影のように、スマートフォンを対象に向け、ゆっくり動かすことで点群を取得できます。取得した点群は、図「ベース点群への重ね合わせ」のように、ベースとなる大規模な点群上に重ね合わせて表示します。
-
メッシュモデル
頂点、辺、面からなる多角形表現の3Dモデル。

点群取得結果
本実証では、地下及び地上の2つの環境で実証を行いました。
都庁前駅でのデータ取得
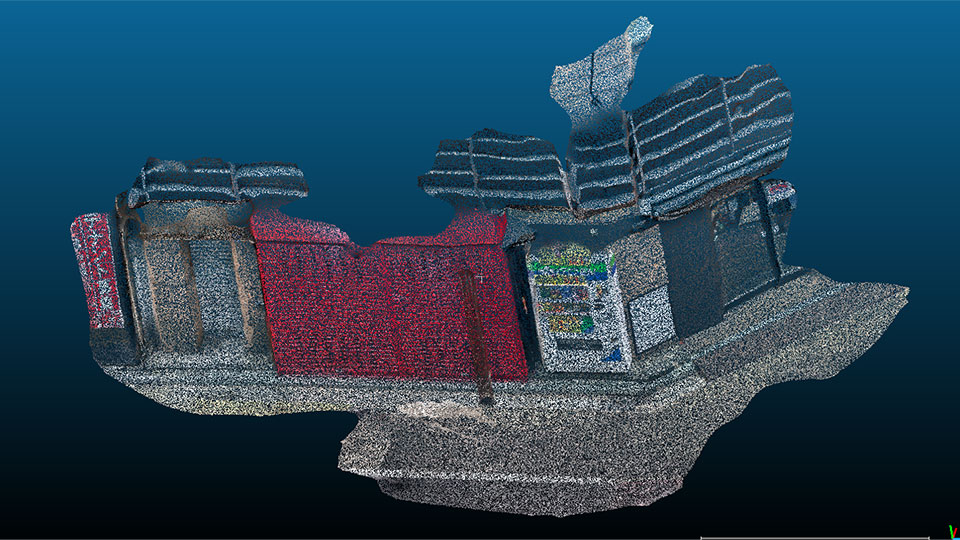
地下環境として、都庁前駅で実証を行いました。駅構内における3Dマップ更新の活用事例としては、掲示板等の3Dモデル上での更新、バリアフリートイレ内設備・点字ブロック等バリアフリー設備詳細を3Dモデル上で更新する等が考えられます。
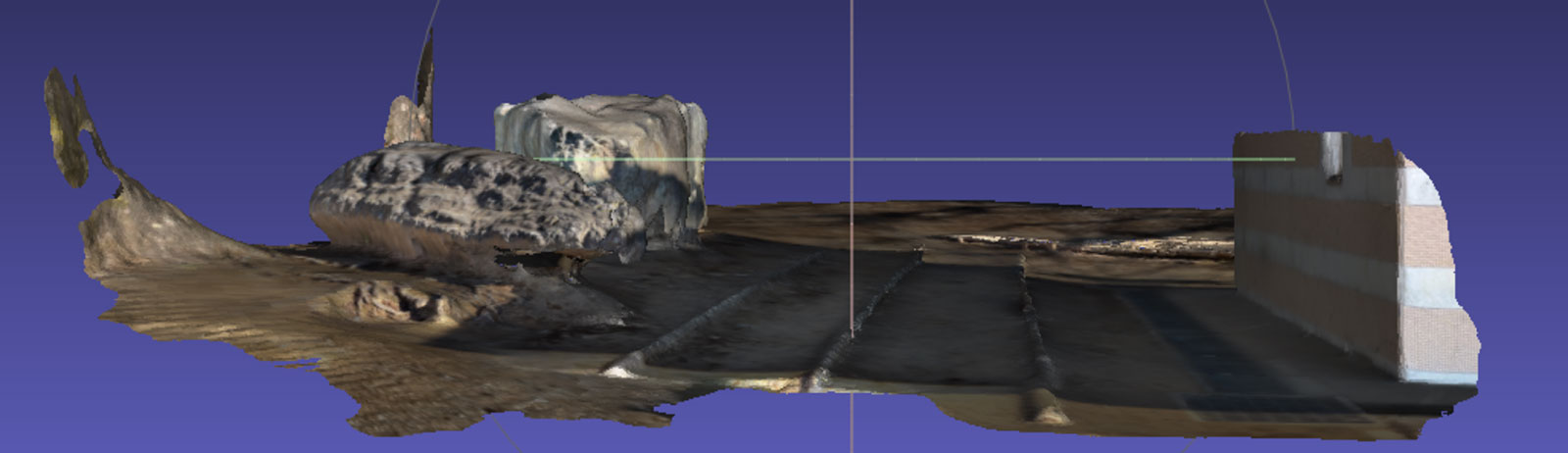
都庁前駅バリアフリートイレの3D情報取得
バリアフリートイレ(男性トイレ側)メッシュデータ
バリアフリートイレ(女性トイレ側)メッシュデータ
3Dマップ更新の技術検証
技術的課題として、鏡面オブジェやトイレ内鏡等、光を反射・透過するものはLiDARによる取得が困難であることがわかりました。また、自動重畳に不利な条件として、GPS、コンパス方位が利用困難である環境や、列柱等同じような構造の連続があることがわかりました。
ユースケース例
- 掲示板等の3Dモデル上での更新
- バリアフリートイレ内設備、点字ブロック等の詳細を3Dモデル上で確認
技術検証
- 鏡面オブジェ・トイレ内鏡等、光を反射する面は取得が困難
- GPS・コンパス方位が利用困難な地下環境は自動重畳には不利
- 同じような構造の連続(柱、ホーム等)は自動重畳に不適


参加型実証
内容
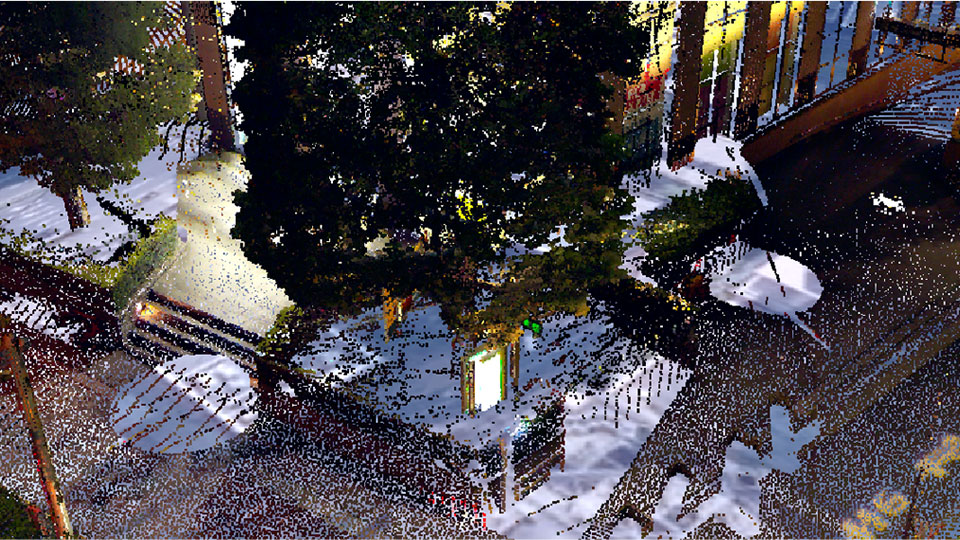
「デジタル上野の杜」プロジェクト※4と連携し、3Dビューア上に上野恩賜公園の3D点群データを重畳しました。さらに、実証の一環として、実証03関係者等デジタルツイン実現プロジェクト関係者、デジタル上野の杜プロジェクト関係者において上野恩賜公園における参加型実証を行いました。
-
「デジタル上野の杜」プロジェクト
「文化の杜」である上野恩賜公園をまるごとデジタル化し、リアルでもオンラインでも学びや交流を生むプラットフォームを実現を目指すプロジェクト。(本プロジェクトは東京都政策企画局と東京藝術大学、東京大学が連携して実施しています。)




結果
参加型実証では、実証03で得た成果やノウハウを参加者に伝えた上で、看板の点群・メッシュを取得いただき、自動重畳できるかどうかの試行を行いました。また、3Dビューア上で詳細確認やアーカイブが有効な地物について参加者で検討し、それらの点群データ取得を行いました。
これらを踏まえ、データアップロード・重畳等、都民参加による3Dデジタルマップ更新の流れについて検証したほか、データ取得方法や収集方法、都民参加促進の方針といった今後の課題の整理を行いました。

AR表示検証
取得した点群についてAR表示を試行し、スマートフォン上でカメラ映像と重ねて確認を行いました。


実証成果・今後の課題
本実証により、以下が明らかになりました。
実証成果
- スマートフォンで取得した点群を、ベースとなる大規模な点群の対応する位置に、自動で位置合わせする技術を新規で実現。点群・メッシュによる3Dマップ更新を自動化することで、都民参加のハードルを下げるための技術を検証した。
- 点群やメッシュを用いた都民参加での3Dマップ更新が有効となる地物・シーンを検討・検証し、「自動販売機や広告等のテクスチャの更新」「設置された看板等、時期限定の地物の追加」「バリアフリー情報の表示」等について実現性及び有用性があることを確認した。
スマートフォンを活用した3Dマップ更新検証の課題・今後の方向性としては、以下が挙げられます。
技術面
- 課題
-
- スマートフォンLiDARの性能により誤差が生じる部分(数十メートル超の大規模な物等)、取得不能な部分等(鏡面等)
- 自動重畳に不利な条件、環境の存在(GPS・方位が正確でない地下やビル群等)
- 今後の方向性
-
- スマートフォンLiDARの取得点群・メッシュの品質における課題整理
- 自動重畳に不利な条件の明確化
運用面
- 課題
-
- 都民一般から収集する重畳点群をマップ更新に利用するための課題の存在(データの正確性確認、仕様の統一等)
- 都民が3Dマップ更新に参加するエコシステム構築
- 今後の方向性
-
- 重畳点群をマップ更新に利用するための行政内における整理
- 都民が3Dマップ更新に参加できる仕組み・インセンティブ検討